
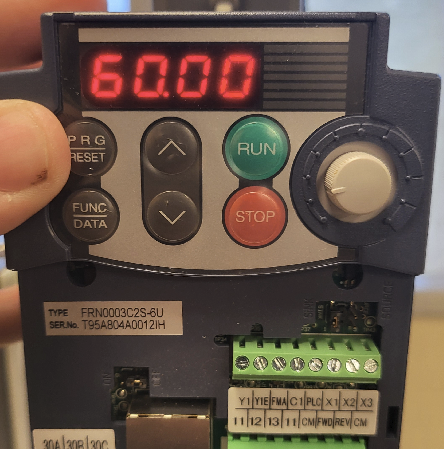
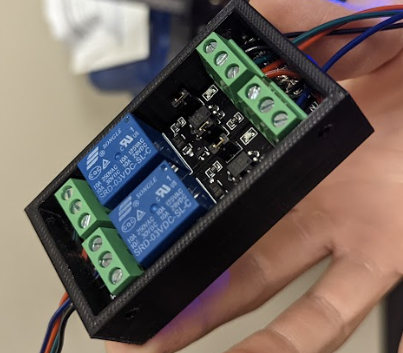
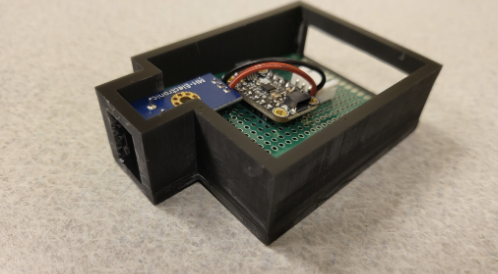
I was fortunate to participate in College of the Deserts Winter Internship, i.e. Winternship of 2023. During the month of January, I was tasked with leading a team of interns, (Jose de Jesus Mendoza, Arturo Lugo and Rene Padron) in developing automation solutions for the Environmental Simulation Lab. This lab is used to test samples under loads of up to 2 tons at various temperatures ranging from -200C to 500C. The operation of the lab required user supervision to conduct these experiments, and collect data regarding the failure point of the sample being tested. We simplified this process by developing custom circuits, and software to more easily control the preexisting hardware, while simultaneously data logging the force applied over time, and the temperature of the chamber. This was done using a single board computer, the raspberry pi 4, in conjunction with the circuits that we designed. We found that the digital read out, for the load cell sensor had an analog voltage output that could be used to measure the force being applied. We interfaced to this by using an analog to digital converter that was connected to the raspberry pi. The compression screw jack operated through an AC motor controller, the fuji frenic mini. We used opto-isolated relays to supply the command signal, (24 Volts) required to start, and reverse the motor. Once these interface circuits were done, we developed python code to control the compression jack, while data logging the force applied from the load cell read out.


This was done using a single board computer, the raspberry pi 4, in conjunction with the circuits that we designed. We found that the digital read out, for the load cell sensor had an analog voltage output that could be used to measure the force being applied. We interfaced to this by using an analog to digital converter that was connected to the raspberry pi. The compression screw jack operated through an AC motor controller, the fuji frenic mini. We used opto-isolated relays to supply the command signal, (24 Volts) required to start, and reverse the motor. Once these interface circuits were done, we developed python code to control the compression jack, while data logging the force applied from the load cell read out.



This was done using a single board computer, the raspberry pi 4, in conjunction with the circuits that we designed. We found that the digital read out, for the load cell sensor had an analog voltage output that could be used to measure the force being applied. We interfaced to this by using an analog to digital converter that was connected to the raspberry pi. The compression screw jack operated through an AC motor controller, the fuji frenic mini. We used opto-isolated relays to control supply the command signal required to start, and reverse the motor.
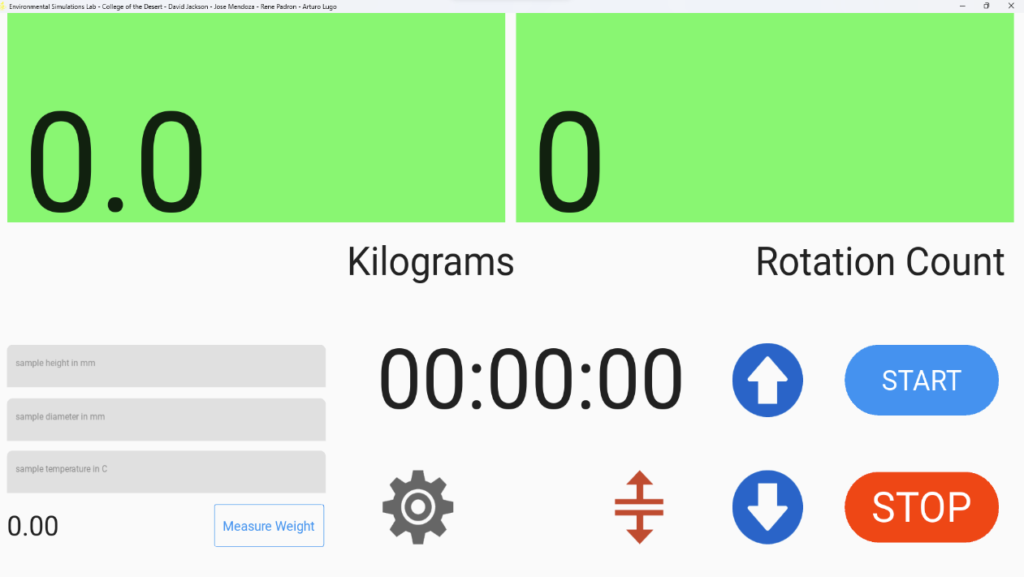
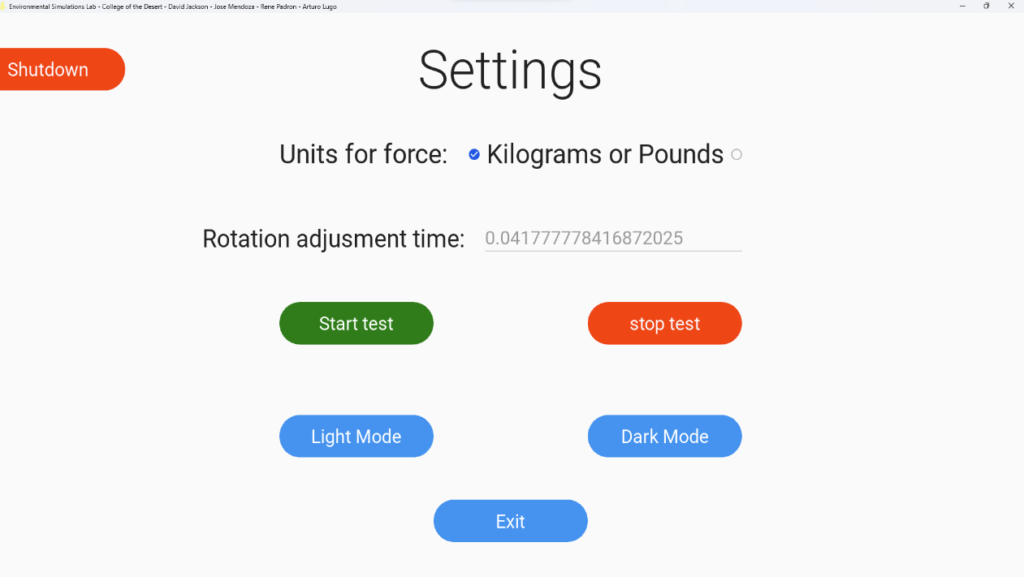
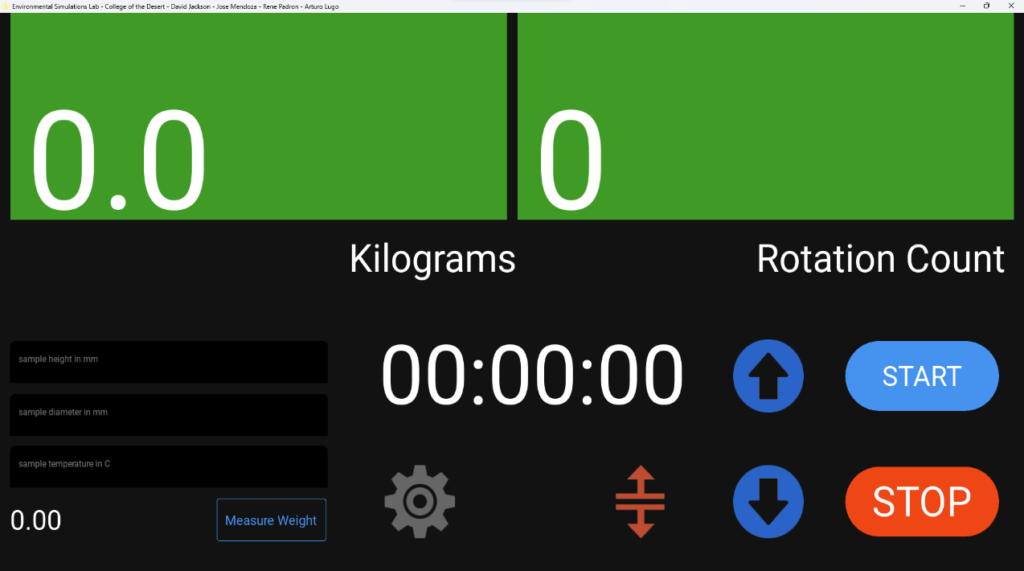
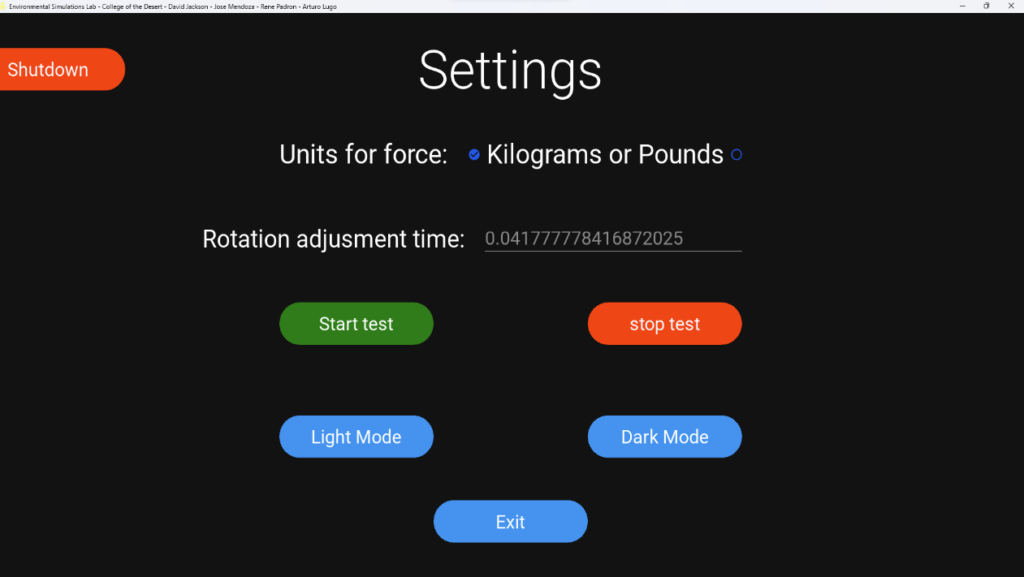
Once these interface circuits were done, we developed python code to control the compression jack, while data logging the force applied from the load cell read out. We found a nice touch screen to house the raspberry pi, and so we took advantage of this by developing a graphical user interface (GUI), using the python libraries: Kivy and KivyMD. This made operation of the chamber easy and intuitive to use, while providing a nice touch to the overall project. We had fun with this process, and incorporated a dark and light mode to the interface to provide a modern feel.
Once everything was done, we finalized our work by designing mounts for the circuits, and the touch screen interface. These components where then mounted to the frame of the machine as seen below.




I am thankful to have had an awesome team, and great mentors. Opportunities like this were made possible thanks to the NSF grant, College of the Desert, and the MESA program. Special thanks to Dr. Farmer, Pr. Gariety, and Dr. ElShafie. I would like to extend my thanks to the team as well for helping make this project happen. I couldn’t have done it with out you guys. Thanks Jose de Jesus Mendoza, Arturo Lugo and Rene Padron!
Leave a Reply